กล้องทำงานร่วมกับหุ่นยนต์
ภาคอุตสาหกรรมต่างๆ ได้มีการนำเอาหุ่นยนต์ไปใช้งานมากขึ้น อุปกรณ์กล้อง Machine Vision จึงมีความจำเป็นอย่างมากสำหรับการใช้งานหุ่นยนต์ เพราะกล้อง Machine Vision ช่วยในการทำงานของหุ่นยนต์ สามารถทำงานได้อย่างราบรื่น เปรียบเสมือนเป็นตาของหุ่นยนต์ ทำให้หุ่นยนต์ทำงานที่ซับซ้อน เพิ่มความยืดหยุ่นในการปรับเปลี่ยนสายการผลิต ลดเวลาในการติดตั้ง ช่วยลดต้นทุน ลดแรงงานคน ช่วยเพิ่มประสิทธิภาพในการผลิตของโรงงานอุตสาหกรรม
ประเภทของการนำกล้องทำงานร่วมกับหุ่นยนต์How to Apply Robot Vision
1. Vision-Guided Robotic Systems (VGR)
ระบบ Vision-Guided Robot (VGR) เป็นหุ่นยนต์ติดตั้ง Vision Sensor เซ็นเซอร์จะเป็นตัวนำหุ่นยนต์เพื่อย้ายไปยังตำแหน่งหรือเป้าหมายที่กำหนด จากนั้นจะดำเนินการตามที่กำหนดไว้ล่วงหน้า ตัวอย่างของฟังก์ชั่น เช่น การเลือกวัตถุและการวางจากลังหรือ Pallet (Bin Picking) ระบบ VGR นั้นทำงานได้รวดเร็ว สามารถเปลี่ยนกระบวนการผลิตโดยการทำปรับหุ่นยนต์ สามารถปรับได้รวดเร็วและใช้งานง่าย ลดต้นทุน และทำงานที่มีความซับซ้อนได้
2. Vision-Inspection Robotic Systems (VIR)
Robot ทำงานร่วมกับระบบ Vision System เพื่อตรวจสอบชิ้นงานแทนคนแบบร้อยเปอร์เซ็นต์ Vision System จะติดตั้งอยู่กับแขนของโรบอทซึ่งเรียกว่า Eye to Hand
Robot จะเคลื่อนที่ไปยังตำแหน่งต่างๆ เพื่อตรวจสอบชิ้นส่วนที่มีรูปร่างซับซ้อน มีขนาดใหญ่ มีจุดที่ต้องการตรวจสอบหลายจุด กล้องที่ตรวจจับรอยเชื่อม welding inspection กล้องที่ตรวจจับการประกอบชิ้นส่วนรถยนต์ ช่วงล่างรถยนต์
ประเภทของกล้องที่นำมาทำงานร่วมกับหุ่นยนต์Camera Type Working with Robot

2D Vision for Robotic
สำหรับตรวจสอบงานทีละหลายจุดในเวลาเดียว เหมาะสำหรับงานทั่วไปที่มีระนาบเดียว มีความแตกต่างของความสูงไม่มาก มีความแตกต่างของพื้นผิวไม่มาก ความสามารถคุมแสงรบกวนภายนอกได้ การตรวจสีต่างๆ การเช็คว่ามีหรือไม่

3D Vision for Robotic
เหมาะสำหรับการตรวจสอบชิ้นงานที่มีความสูงต่างกัน ชิ้นงานที่มีความแตกต่างของพื้นผิวเหมาะสำหรับพื้นที่ที่ควบคุมแสงรบกวนภายนอกได้ยาก สามารถใช้สำหรับการวัดขนาดได้แม่นยำ แต่ไม่เหมาะกับชิ้นงานที่มีความมันวาวสูง ชิ้นงานที่เป็นพื้นผิวโปร่งแสง และไม่เหมาะกับการนำเอาไปตรวจสอบสีของวัตถุ
ประเภทของการติดตั้งกล้องหุ่นยนต์TYPES OF ROBOTIC SYSTEM CONFIGURATION
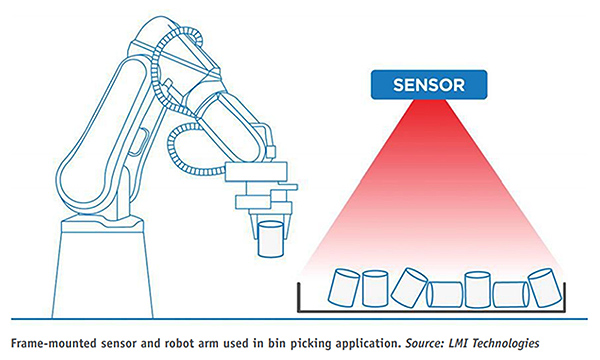
1. Frame-mounted sensor and robot arm used in bin picking
Mounted On Frame (Eye-to-Hand)
ติดตั้งกล้องในตำแหน่งที่แยกออกจากโรบอทโดยกล้องอยู่เหนือชิ้นงานที่ต้องการจะตรวจสอบ โดยกล้องจะส่งข้อมูลตำแหน่งของชิ้นงานให้กับหุ่นยนต์ เพื่อสั่งให้หุ่นยนต์เลื่อนหรือเคลื่อนที่เข้ามาหยิบจับชิ้นงานในตำแหน่งที่กล้องส่งไป โดยส่วนมากกล้องที่ใช้ในการหยิบจับชิ้นงานลักษณะนี้จะเป็น 3D Sensor ซึ่งสามารถให้ค่าตำแหน่งทั้ง XYZ ออกมา ทำให้การเคลื่อนที่มาหยิบจับชิ้นงานของหุ่นยนต์ทำได้แม่นยำ 3D Sensor จะส่งค่า Cloud Point ของชิ้นงานให้กับหุ่นยนต์ ซึ่งหุ่นยนต์จะต้องมีการ calibration ตำแหน่งกับกล้องให้สอดคล้องกันจะทำให้หุ่นยนต์เคลื่อนที่มาหยิบจับชิ้นงานได้แม่นยำ การติดตั้งกล้องลักษณะนี้จะพบมากในงาน Bin Picking ระบบซอฟต์แวร์จะทำการประมวลผลค่าตำแหน่งของชิ้นงานที่จะหยิบในแต่ละครั้งได้อย่างมีประสิทธิภาพโดยการใช้ค่าตำแหน่ง XYZ ที่ได้จาก 3D Sensor นอกจากนี้เรายังสามารถใช้การติดตั้งลักษณะนี้ช่วยในการตรวจสอบคุณภาพของชิ้นงานในเวลาเดียวกันไม่ว่าจะเป็นขนาดรูปร่างว่ายังอยู่ในค่ามาตรฐานหรือไม่
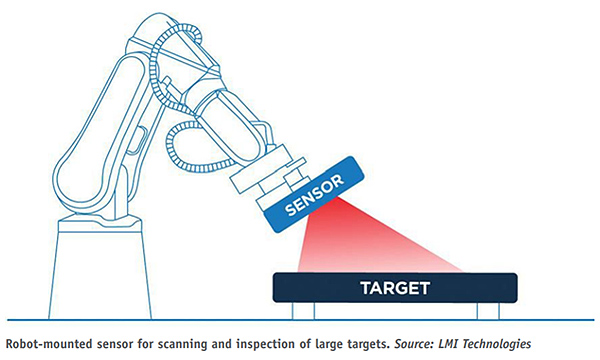
2. Robot-mounted sensor for scanning and inspection of large targets
Mounted on Robot Arm (Eye-in-Hand)
ตั้งกล้องในตำแหน่งที่ปลายแขนของโรบอท ช่วยให้ Robot เคลื่อนที่ไปในตำแหน่งต่างๆ แบบ Real Time โดยใช้งานในลักษณะนี้กับการทำ Robot welding การจัดตำแหน่งเพื่อประกอบชิ้นงาน การติดตั้งต้องการ Calibrate ตำแหน่งของกล้องและตำแหน่งของ Robot อย่างแม่นยำ เพื่อช่วยให้การใช้งานโรบอททำได้ถูกต้องมีประสิทธิภาพ สามารถทำงานได้อย่างยืดหยุ่น ช่วยในการตรวจสอบชิ้นงานขนาดใหญ่ได้ สำหรับการตรวจสอบชิ้นส่วนรถยนต์ขนาดใหญ่ ชิ้นส่วนช่วงล่าง ชิ้นส่วนฝาสูบเสื้อสูบของรถยนต์ ตัวถังรถยนต์ หรือแม้แต่การประยุกต์ใช้งานกับงาน Reverse Engineering กับชิ้นงานขนาดใหญ่ โดยทั่วไปการติดตั้งกล้องที่ปลายแขนของโรบอทสามารถเป็นได้ทั้งกล้อง 2D และ 3D ขึ้นอยู่กับลักษณะงานที่นำไปตรวจสอบ รวมถึงสามารถใช้ในลักษณะของงาน blinking ได้ด้วย แต่มีข้อจำกัดที่ชิ้นงานจะต้องไม่มีขนาดใหญ่

3. Fixed-mount sensor used for dimensional measurement and quality inspection
ลักษณะนี้ใช้กล้องติดตั้งอยู่กับที่แล้วใช้ Robot ในการหยิบชิ้นงานที่ต้องการตรวจสอบเคลื่อนที่เข้ามาที่หน้าของกล้อง ชิ้นงานที่จะใช้ต้องมีขนาดไม่ใหญ่มาก เหมาะสำหรับการตรวจสอบคุณภาพของชิ้นงานที่ไม่สามารถลำเลียงด้วยระบบสายพานลำเลียงทั่วไป ชิ้นงานที่มีจุดวัดหรือจุดที่ตรวจสอบหลายจุดอยู่ในทิศทางหรือมุมที่ตรงข้ามกัน การใช้หุ่นยนต์เพื่อหยิบชิ้นงานเข้ามาตรวจสอบกับกล้องที่ตำแหน่งอยู่ทำให้ลดจำนวนกล้องที่ต้องใช้ในการตรวจสอบโดยใช้หุ่นยนต์ในการบิดหมุนหาตำแหน่งของจุดที่ต้องการตรวจสอบในชิ้นงานแต่ละชิ้น
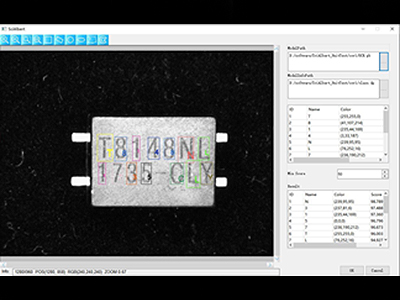
Bin Picking Robot Vision
Photoneo AnyPick - Fish Picking
Gocator G3210- Eye-in Hand Bin Picking
Download PDF Files
เลือกใช้ระบบกล้องกับหุ่นยนต์ที่เหมาะกับงานของท่านเราได้จัดกล้องโดยแบ่งตามความสามารถและลักษณะการใช้งานเป็น Package ตามด้านล่างนี้
Package A: Smart Vision sensors for robotic-XF900
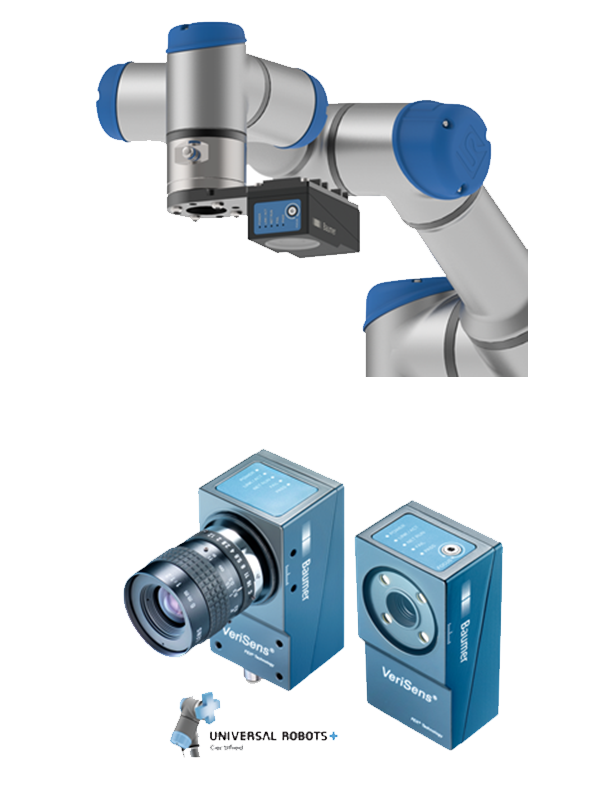
Baumer Vision Sensor : VS XF900M03W08IP
Camera System Specification
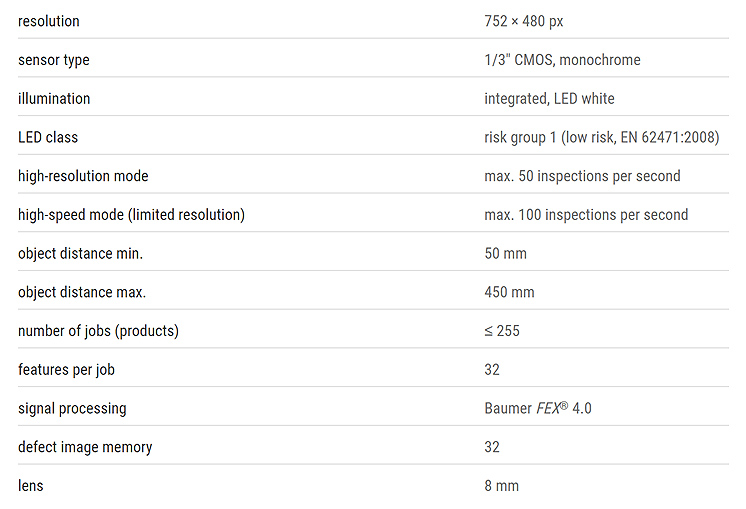
- ความละเอียดกล้อง 752x480 pixel
- เซ็นเซอร์เป็นแบบ CMOS แบบ ขาวดำ ขนาด 1/3”
- มีแหล่งกำเนิดแสงแบบ LED สีขาวในตัว LED ได้มาตรฐาน EN 62471:2008
- ความเร็วในการตรวจสอบ 100 ครั้งต่อวินาที
- ขนาดของ lens 8 mm มีระยะในการตรวจจับ 50-450 mm
- สามารถทำ โปรแกรมได้ 255 โปรแกรม
- สามารถเชื่อมต่อ กับ Universal Robots+ Certified (UR+) for UR3e, UR5e, UR10e, UR16e
- มีระบบการสื่อสารแบบ PROFINET and EtherNet/IP interface integrated
- มี 5 input และ 5 output
- มีฟังชั่นควบคุม LED Lighting ( Flash signal) ภายนอกในตัว
- สามารถเชื่อมต่อ encoder ได้โดยตรงโดยไม่ต้องผ่านอุปกรณ์ภายนอก
- ใช้ไฟเลี้ยง 24 VDC +- 25%
- มี program image processing ในตัว
- มี function ในการตรวจสอบ 21 function ในตัว
- รองรับการเชื่อมต่อ แบบ Web interface
- มีโปรมแกรมภาษาไทย
- มี function ค้นหา แบบ 360°
Package B: Smart Vision sensors for robotic-CS100

Baumer Vision Sensor : VS CS100M03W10EP

Camera System Specification
- ความละเอียดกล้อง 752x480 pixel
- เซ็นเซอร์เป็นแบบ CMOS แบบ ขาวดำ ขนาด 1/3”
- มีแหล่งกำเนิดแสงแบบ LED สีขาวในตัว LED ได้มาตรฐาน EN 62471:2008
- ความเร็วในการตรวจสอบ 50 ครั้งต่อวินาที
- ขนาดของ lens 10 mm มีระยะในการตรวจจับ 50 mm
- มี program image processing ในตัว
- สามารถทำโปรแกรมได้ 255 โปรแกรม
- มีระบบการสื่อสารแบบ Ethernet (10BASE-T / 100BASE-TX)
- มี function ค้นหา แบบ 360°
- มี 5 input และ 5 output
- มีฟังชั่นควบคุม LED Lighting (Flash signal) ภายนอกในตัว
- สามารถเชื่อมต่อ encoder ได้โดยตรงโดยไม่ต้องผ่านอุปกรณ์ภายนอก
- ใช้ไฟเลี้ยง 24 VDC +- 25%
- รองรับการเชื่อมต่อ แบบ Web interface
- มีโปรมแกรมภาษาไทย

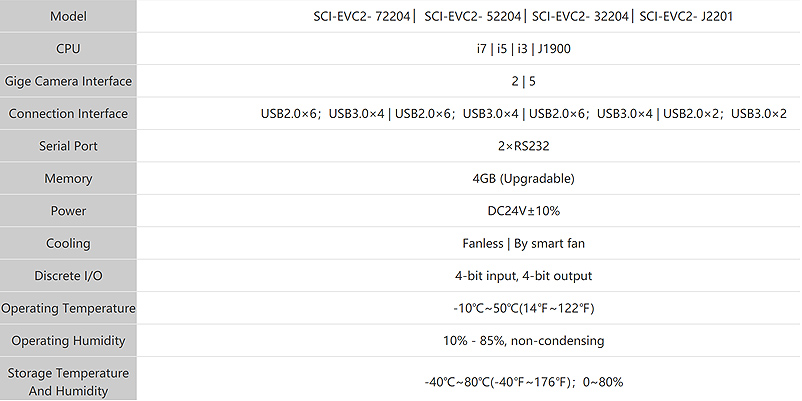

Camera System Specification
- ความละเอียดกล้อง 1280×1024 pixel
- เซ็นเซอร์เป็นแบบ CMOS แบบ color ขนาด 1/2”
- มีความเร็ว frame 75 ครั้งต่อวินาที
- ขนาดของ lens 8 mm
- สามารถเชื่อมต่อกล้องได้ 2 ตัว ผ่าน port GigE
- ขนาดความจุ Ram 4 GB
- มีระบบการสื่อสารแบบ Ethernet (10BASE-T / 100BASE-TX)
- มี port แสดงภาพแบบ VGA หรือ HDMI หรือ DVI
- มี Program image processing ในตัว สามารถปรับตั้งได้อย่างอิสระ
- มี 4 input และ 4 output
- เชื่อมต่ออุปกรณ์ ควบคุม ไฟ LED ผ่านทางสาย LAN
- ใช้ไฟเลี้ยง 24 VDC
Package D: Smart 3D Vision for robotic- G3210 snapshot
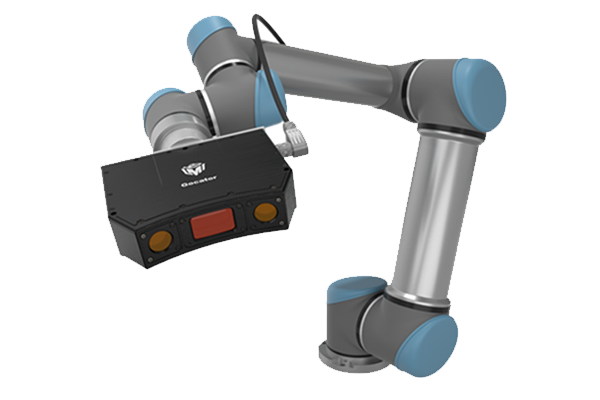
Gocator G3210 Snapshot 3D smart sensor
- Gocator 3210 ใช้เทคโนโลยีเลเซอร์ LED สีฟ้า และมุมมองแบบกว้างเพื่อการตรวจสอบอย่างเต็มรูปแบบของชิ้นงานขนาดใหญ่ (เช่น ชิ้นส่วนยานยนต์และชุดประกอบ)
- อัตราการสแกนที่รวดเร็ว 6 Hz
- กล้องสเตอริโอความละเอียด 2 ล้านพิกเซล ช่วยลดข้อผิดพลาด
- มุมมองภาพขนาดใหญ่ (FOV) สูงถึง 100 x 154 มม.
- เหมาะสำหรับงาน Pick and Place ของหุ่นยนต์ / และการวัดขนาดงานที่วางอยู่กับที่

Package E: Smart 3D Vision for robotic- G2100 line profile

Gocator G2140 Line profiler 3D smart sensor
- Entry-Level 3D Laser Line Profile Sensors
- ใช้ Gocator® 2100 สำหรับแอปพลิเคชันตรวจสอบคุณภาพแบบอินไลน์ที่คุ้มค่าโดยไม่ต้องใช้ความละเอียดสูงสุด
- ความละเอียดระดับ VGA 640 Point ต่อโปรไฟล์
- มุมมองภาพกว้างสูงสุด 194 มม. (FOV)
- ช่วงการวัดสูงสุด 1,350 มม. (MR)
